SofGAN: A Portrait Image Generator with Dynamic Styling
原文链接
SofGAN: A Portrait Image Generator with Dynamic Styling. ACM Trans. Graph. 41(1): 1:1-1:26 (2022)
近年来,生成对抗网络(Generative adversative Networks, GAN)被广泛用于肖像图生成。然而,在GAN学习到的潜在空间中,不同的属性,例如姿势,形状和纹理风格,通常会相互纠缠,使得对特定属性的显式控制变得困难。为了解决这个问题,我们提出SofGAN图像生成器,把肖像的潜在空间分离成两个子空间:几何空间和纹理空间。从两个子空间中采样的潜在编码被分别送入两个网络分支,一个用于生成具有标准姿势的3D几何图形,另一个用于生成纹理。对齐的3D几何图形还带有语义分割,被编码为语义占用域(semantic occupancy field, SOF)。SOF允许在任意视图中呈现一致的2D语义分割映射,然后将其与生成的纹理映射融合,并使用我们的语义实例(semantic instance-wise, SIW)模块将其风格化(stylized)为肖像图片。通过大量实验,我们证明了我们的系统能生成高质量肖像图,并且具有独立可控的几何和纹理属性。该方法也适用于各种应用,例如外观一致的人脸动画和动态风格。代码可在sofgan.github.io获得。
4 GEOMETRY MODELING
以前的方法使用有符号距离函数(signed distance function, SDF)或占用域(occupancy field, OF)作为3D点或网格的替代几何表示(representation)。例如,SDF函数$\mathcal{F}(x)$定义了$\mathbb{R}^3$模型的有符号距离(signed distance value)或占用概率(occupancy probability)。此类函数仅描述表面几何(空间位置,法线(normal)等)但不考虑表面语义。我们观察到,这些语义成分对真实感图像的生成至关重要:它们为生成令人信服的纹理和着色细节提供了关键指导。
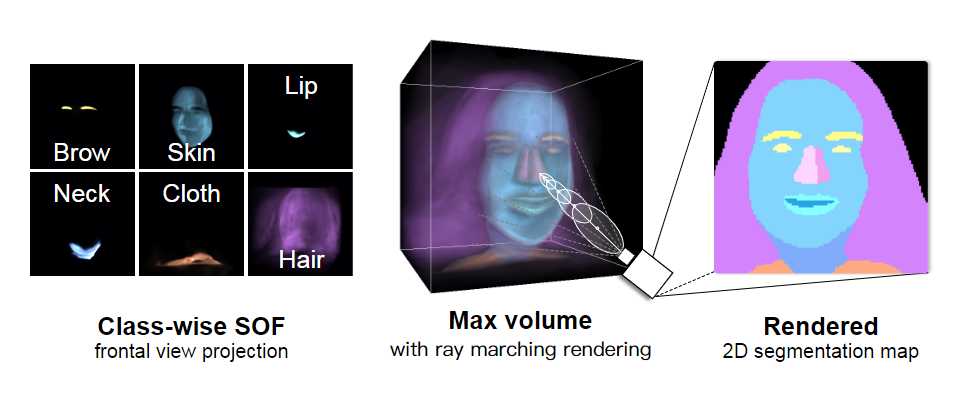
相反,我们使用一种新的语义占用域(semantic occupancy field, SOF)表示,它通过将输入点$x \in \mathbb{R}^3$映射到$k$-维向量来扩展SDF,以描述其属于$k$种不同的语义类别(例如眼睛,嘴,头发,帽子,衣服等)的占用概率。在SOF中结合语义标签域几何图形有几个关键好处。
(1)由语义类别定义的区域是区域风格合成和调整的基本单位。这种对肖像的各个组成部分(例如头发 vs. 眼睛 vs. 嘴巴)的区域性控制大大优于将图像视为单个实体的蛮力方法。
(2)自由视角图像生成是SOF的自然延伸,可以无缝集成到深度网络中:SOF描述了可以通过后续神经渲染直接合成的新视图的几何属性。
SOF将几何和语义标签建模为:
其中语义占用函数$\mathcal{F}(x)$给每一个在3D空间中的点$x \in \mathbb{R}^3$分配了一个基于$k$个语义类别的$k$维概率($P_x$)。
4.1 Neural SOF Representation
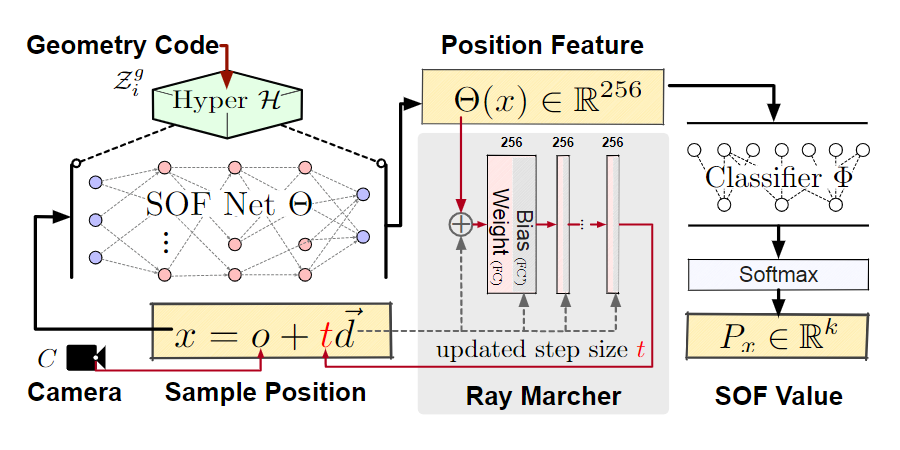
受最近的神经场景表示(neural scene representations)启发,我们使用两个多层感知机(MLP)来估计$\mathcal{F}$,一个SOF网络$\Theta$,和一个分类器$\Phi$。如Fig. 4所示,$\Theta$将每个空间位置$x \in \mathbb{R}^3$映射为一个特征向量$f \in \mathbb{R}^n$,它对语义属性进行编码,而$\Phi$对应一个语义分类器,通过softmax激活把$f$解码为$k$维语义概率向量$P_x$:
我们通过将已知的3D肖像模型渲染成多视角分割图(segmentation maps, segmaps)来训练SOF,并计算渲染的segmaps和实际的segmaps的二元交叉损失。如附录中Fig. 19所示,可以通过对真实多角度肖像图进行语义分析,或通过语义标签(例如,纹理上)渲染合成3D模型来获取实际分割图。
为了解决3D肖像的多样性,蛮力方法是为每个肖像实例训练一个单独的SOF。这种方法效率很低,因此不适用于实际应用。相反,我们训练了一个几何采样空间,以便使用潜在编码在潜在空间中支持各种肖像实例。我们观察到,3D人像展示了相似的布局,即眼睛,头发,鼻子和嘴唇遵循一致的空间布局。这使我们能够训练一个共享的规范潜在几何空间。具体来说,对于每个实例的网络,我们采用了一个共享的超网络$\mathcal{H}$(Fig. 4)来学习SOF网络$\Theta$的权重。在共享的超网络下,我们可以用一个潜在向量$z^g$表示训练数据集中的每个实例:
其中$i$代表训练集$\mathcal{D}$中的第$i$个实例。我们使用所有的$z^g$来组成具有高斯混合模型的几何采样空间$\mathcal{G}$。在我们的实现中,我们构建了一个由122个分割好的肖像扫描构成的数据集,对于每个模型,我们随机选取视角渲染了64个分割图。
4.2 Free-Viewpoint Segmap Rendering
给定训练好的SOF,我们随后可以渲染自由视角分割图。Fig. 4详细展示了渲染过程:我们通过射线行进策略和估计每条射线的深度$t$(从相机中心到表面)从SOF中提取肖像表面,总共为$N$步行进步长$t_i, i \in [1, N]$。肖像表面$\mathcal{S}$对应于点:
对于每个前向渲染过程,我们首先向场景投射射线,然后使用射线行进策略获取表面点$x$(Fig. 5中间)通过迭代来估计行进步长$t_i$,最后用Eq. 3预测语义性质。射线行进中的步伐递增可以使用LSTM网络模拟,并且实现了令人满意的场景表示性能。然而,我们观察到LSTM架构在视角变化期间非常不稳定并且对新视角很敏感,如附录Fig. 15所示。
因此,我们提出了一种更稳定的射线行进器(Fig. 4中间),它可以根据当前位置特征和射线方向预测步长。每个射线行进MLP层包含两个子全连接层$FC_i$和$FC_i’$,其中$FC_i$是一个没有添加偏置的线性映射(即,$b$在线性层$y = xA^T + b$)同时$FC_i’$将射线方向映射为层偏置。
Fig. 5展示了一个对空间中每个点都预测了语义标签的样本SOF(我们只展示了对应于最高概率的标签)。我们还展示了我们提出的MLP射线行进模块在渲染质量上的改进,该模块优于附录Fig. 15中的LSTM。
为了在推理阶段进一步确保视角之间的深度一致性,我们使用了行进块(marching cube, MC)算法提取了一个粗略的肖像代理(proxy),并使用重新投影的深度作为射线行进的初始深度。